Aspiring Mechatronics Engineer / Robotics Enthusiast

Robotic Arm Flywheel Shooter
RC Vehicle
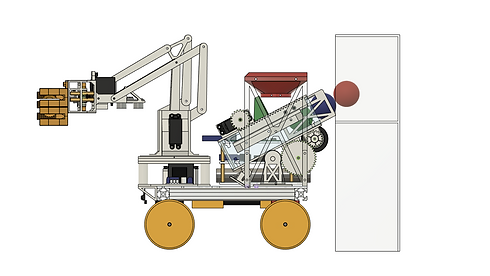
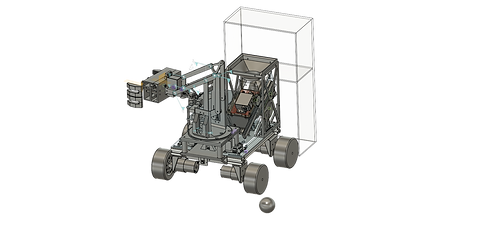
Different Views of CAD Model

Robotic Arm
Gripper:
Custom-designed Claw Gripper utilizes the Rack & Pinion mechanism to clamp or release an object.
Ridges/Tooth-liked Notches on the claw gripper assists in getting a better grip of the object with its increased contact surface.
Orientation:
Robotic Arm is able to maneuver in a 180 degrees range of rotation on the x-y plane.
Claw Gripper is able to stretch forward and retract backward, raise up and lower down by manipulating the linkages.
Flywheel Shooter -> Stovetop
The flywheel shooter mechanism is angled in an orientation such that the collected balls could be shot into the stovetop directly.
Shooting Mechanism:
Storage Lever utilizes the Rack & Pinion mechanism which is controlled by the Servo Motor to drive the balls forward to the flywheel.
Flywheel utilizes the Spur Gear mechanism which is controlled by the DC Geared Motor to spin at a high speed to generate the shooting motion of the ball.

Controller Boards
Raspberry Pi:
Processing Instructions via Python Script and send them to the Arduino Mega via Serial Communication
Receive Sensory Images from the RPi Camera for Computer Vision (OpenCV) to locate the balls autonomously and path planning for the vehicle.
Arduino Mega:
Receive motion instructions from the RPi and Drive the DC Motors
Control the motion of the Robotic Arm
Perspective View
Spacing of the Flywheel Shooter mechanism to the Stovetop